Function-centric Bayesian Network for Zero-Shot Object Goal Navigation
{kind=link}
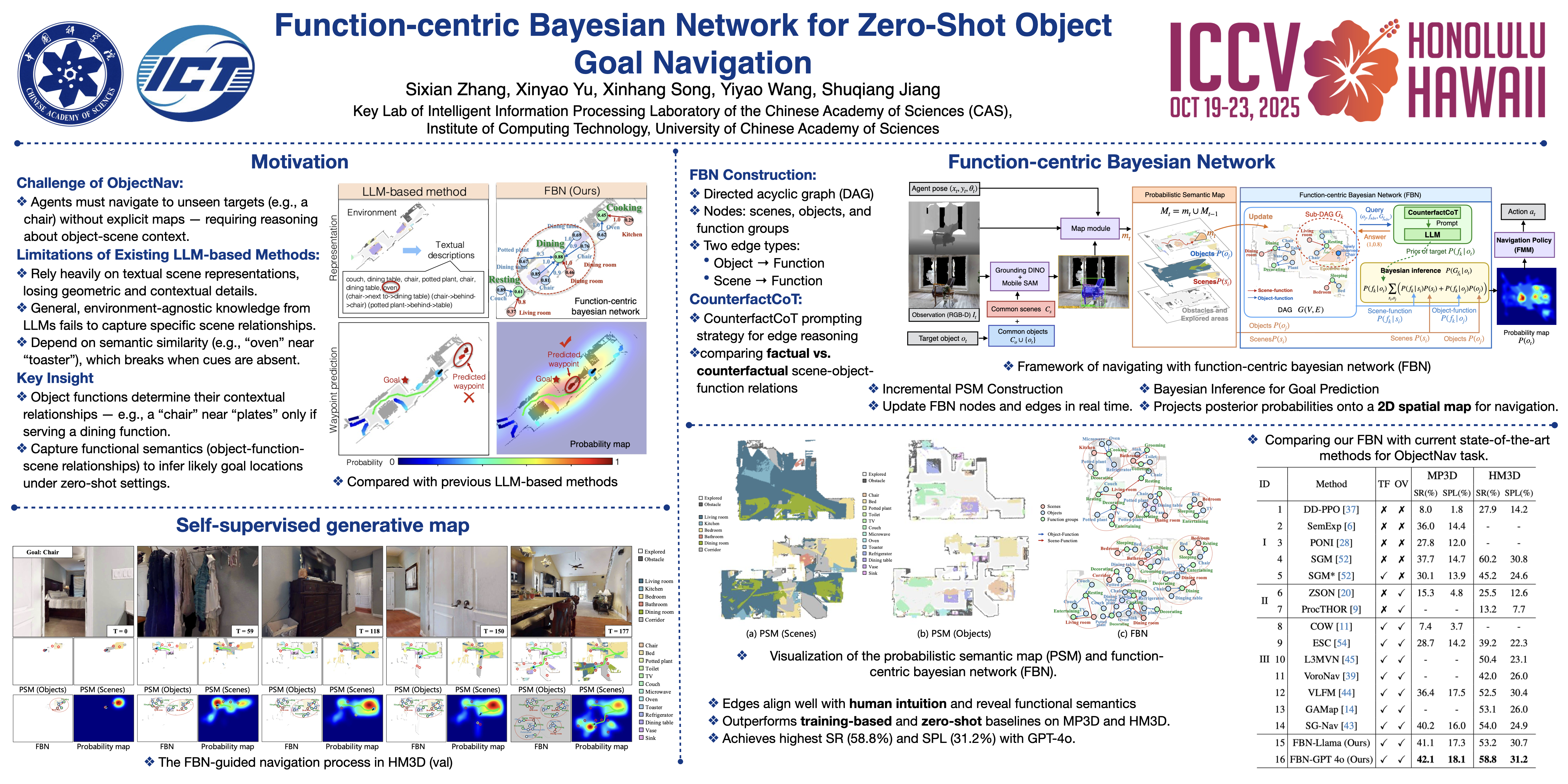
Abstract
Object goal navigation requires an agent to navigate to a specified target in unseen environments without an explicit map, which demands an understanding of object-scene contextual relationships to infer the target's location based on partial observations.The function of an object plays a crucial role in its categorization and naming. Analyzing an object's functional role within a given scene enhances the understanding of its contextual relationships, thereby aiding in goal inference. In this paper, we propose the function-centric bayesian Network (FBN) for the zero-shot ObjectNav task.FBN is designed to uncover the functions that observed objects afford individually or collaboratively with other objects, as well as the functional semantics contained within the observed scenes. The probabilistic directed edges in FBN describe the object-function and scene-function relationships, which are derived by prompting LLMs with the proposed CounterfactCoT. CounterfactCoT determines existence and probability of edgs, by guiding LLMs to compare the impact of an edge’s existence or absence on the surrounding context.Leveraging FBN with Bayesian inference, the probability of each function group and probability map of goal occurance are computed. Then the waypoint is selected based on obtained probability map. Experiments on MP3D and HM3D demonstrate that FBN effectively captures object-scene-function relationships and improves zero-shot ObjectNav performance.