CLOT: Closed Loop Optimal Transport for Unsupervised Action Segmentation
{kind=link}
Abstract
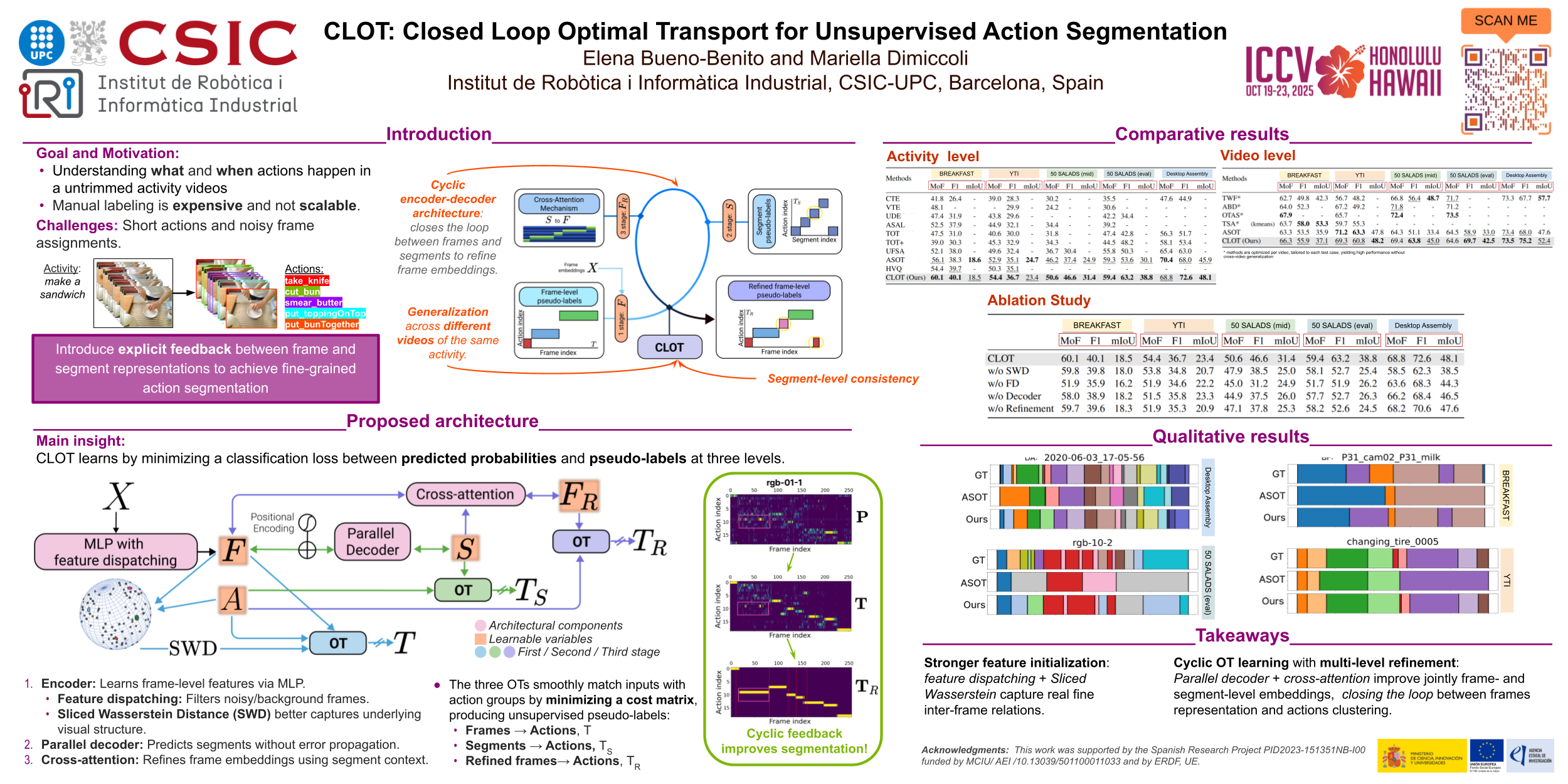
Unsupervised action segmentation has recently pushed its limits with ASOT, an optimal transport (OT)-based method that simultaneously learns action representations and performs clustering using pseudo-labels. Unlike other OT-based approaches, ASOT makes no assumptions on the action ordering, and it is able to decode a temporally consistent segmentation from a noisy cost matrix between video frames and action labels. However, the resulting segmentation lacks segment-level supervision, which limits the effectiveness of the feedback between frames and action representations. To address this limitation, we propose Closed Loop Optimal Transport (CLOT), a novel OT-based framework that introduces a multi-level cyclic feature learning mechanism. Leveraging its encoder-decoder architecture, CLOT learns pseudo-labels alongside frame and segment embeddings by solving two separate OT problems. It then refines both frame embeddings and pseudo-labels through cross-attention between the learned frame and segment embeddings, integrating a third OT problem. Experimental results on four benchmark datasets demonstrate the benefits of cyclical learning for unsupervised action segmentation.