Seam360GS: Seamless 360° Gaussian Splatting from Real-World Omnidirectional Images
{kind=link}
Abstract
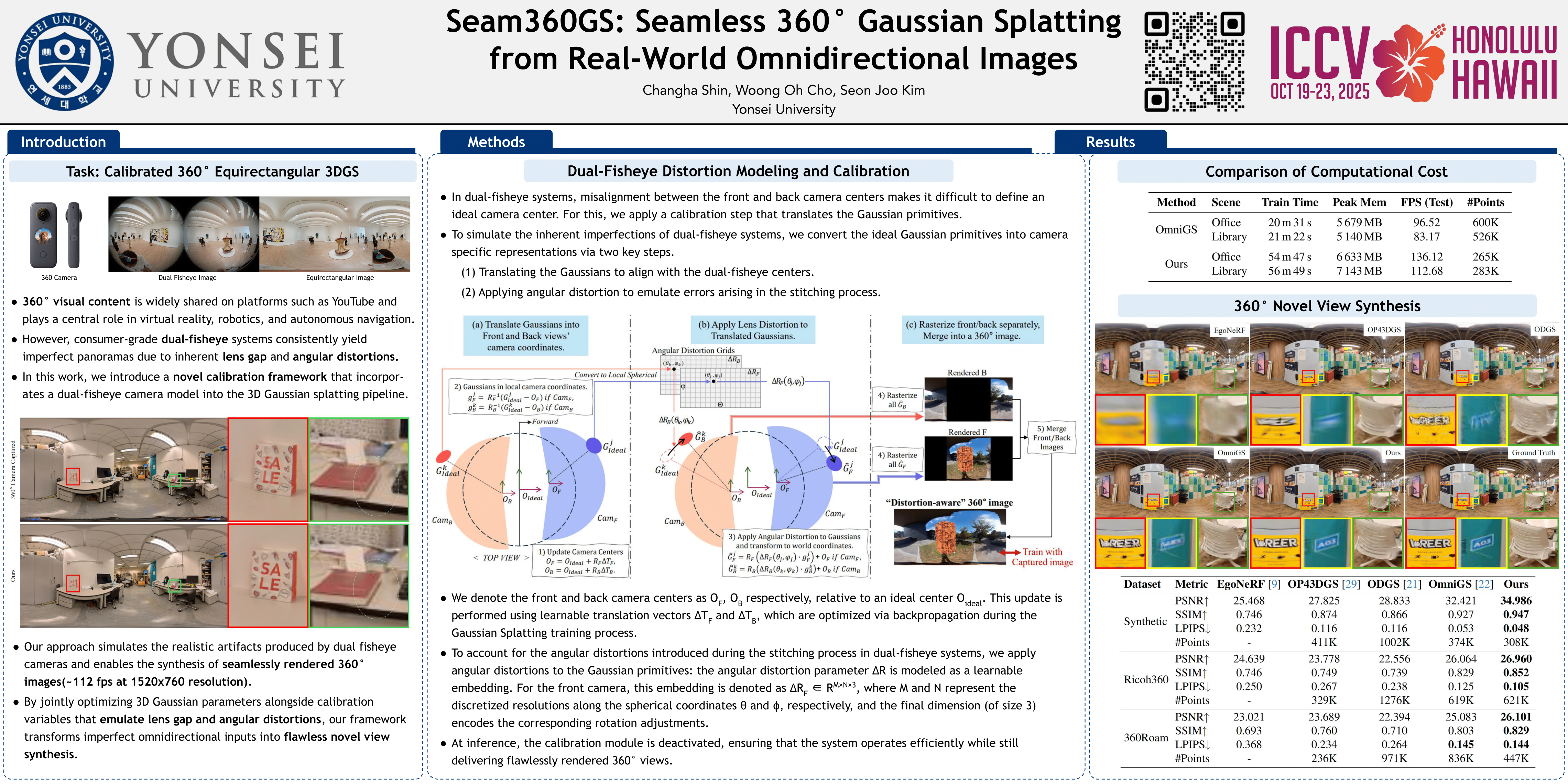
360° visual content is widely shared on platforms such as YouTube and plays a central role in virtual reality, robotics, and autonomous navigation. However, consumer-grade dual-fisheye systems consistently yield imperfect panoramas due to inherent lens separation and angular distortions. In this work, we introduce a novel calibration framework that incorporates a dual-fisheye camera model into the 3D Gaussian Splatting pipeline. Our approach not only simulates the realistic visual artifacts produced by dual-fisheye cameras but also enables the synthesis of seamlessly rendered 360° images. By jointly optimizing 3D Gaussian parameters alongside calibration variables that emulate lens gaps and angular distortions, our framework transforms imperfect omnidirectional inputs into flawless novel view synthesis. Extensive evaluations on real-world datasets confirm that our method produces seamless renderings—even from imperfect images—and outperforms existing 360° rendering models.