SRefiner: Soft-Braid Attention for Multi-Agent Trajectory Refinement
 Highlight
Highlight
{kind=link}
Abstract
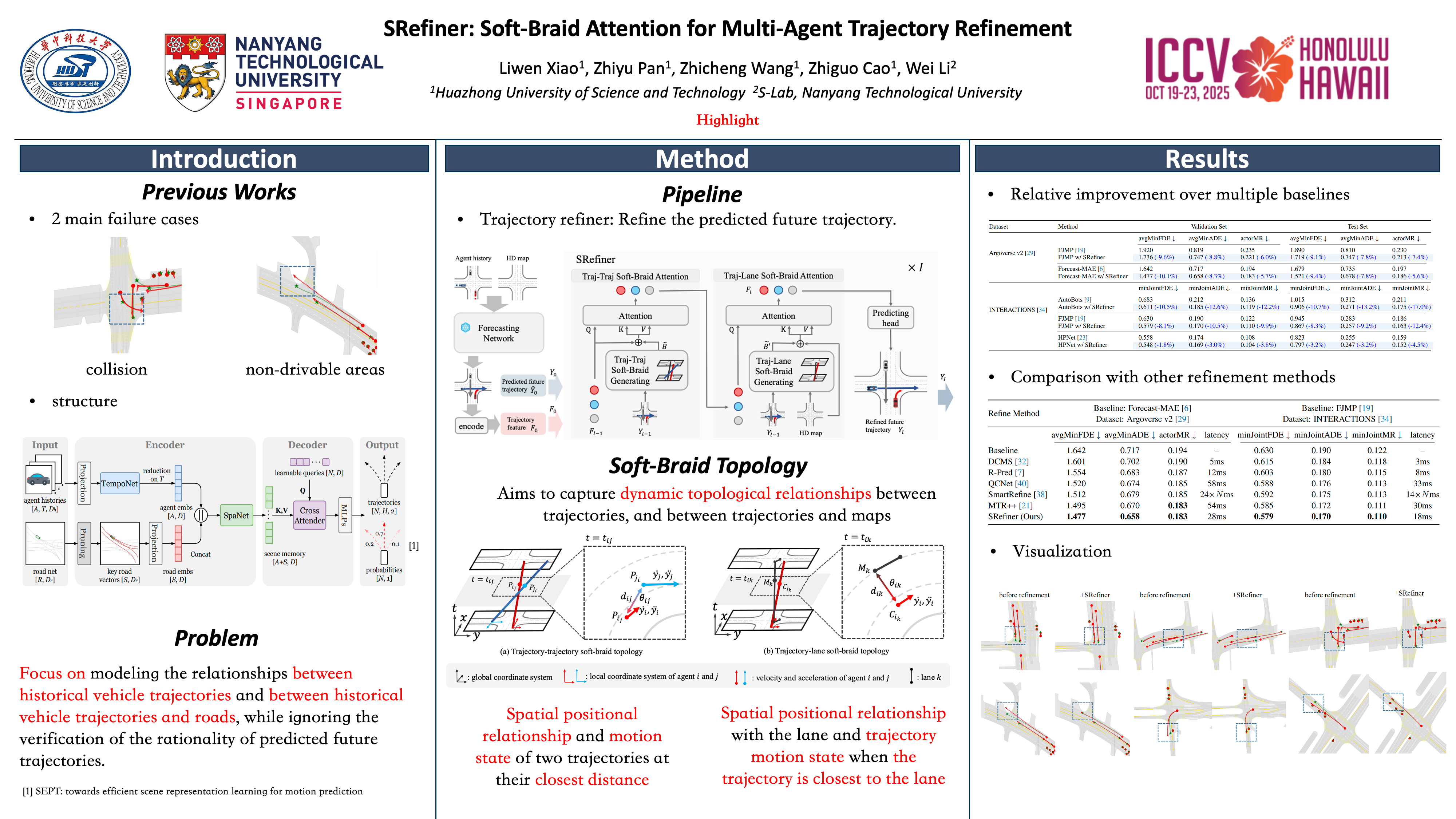
Accurate prediction of multi-agent future trajectories is crucial for autonomous driving systems to make safe and efficient decisions. Trajectory refinement has emerged as a key strategy to enhance prediction accuracy. However, existing refinement methods often overlook the topological relationships between trajectories, which are vital for improving prediction precision. Inspired by braid theory, we propose a novel trajectory refinement approach, Soft-Braid Refiner (SRefiner), guided by the soft-braid topological structure of trajectories using Soft-Braid Attention. Soft-Braid Attention captures spatio-temporal topological relationships between trajectories by considering both spatial proximity and vehicle motion states at ``soft intersection points". Additionally, we extend this approach to model interactions between trajectories and lanes, further improving the prediction accuracy. SRefiner is a multi-iteration, multi-agent framework that iteratively refines trajectories, incorporating topological information to enhance interactions within traffic scenarios. SRefiner achieves significant performance improvements over four baseline methods across two datasets, establishing a new state-of-the-art in trajectory refinement.