Statistical Confidence Rescoring for Robust 3D Scene Graph Generation from Multi-View Images
{kind=link}
Abstract
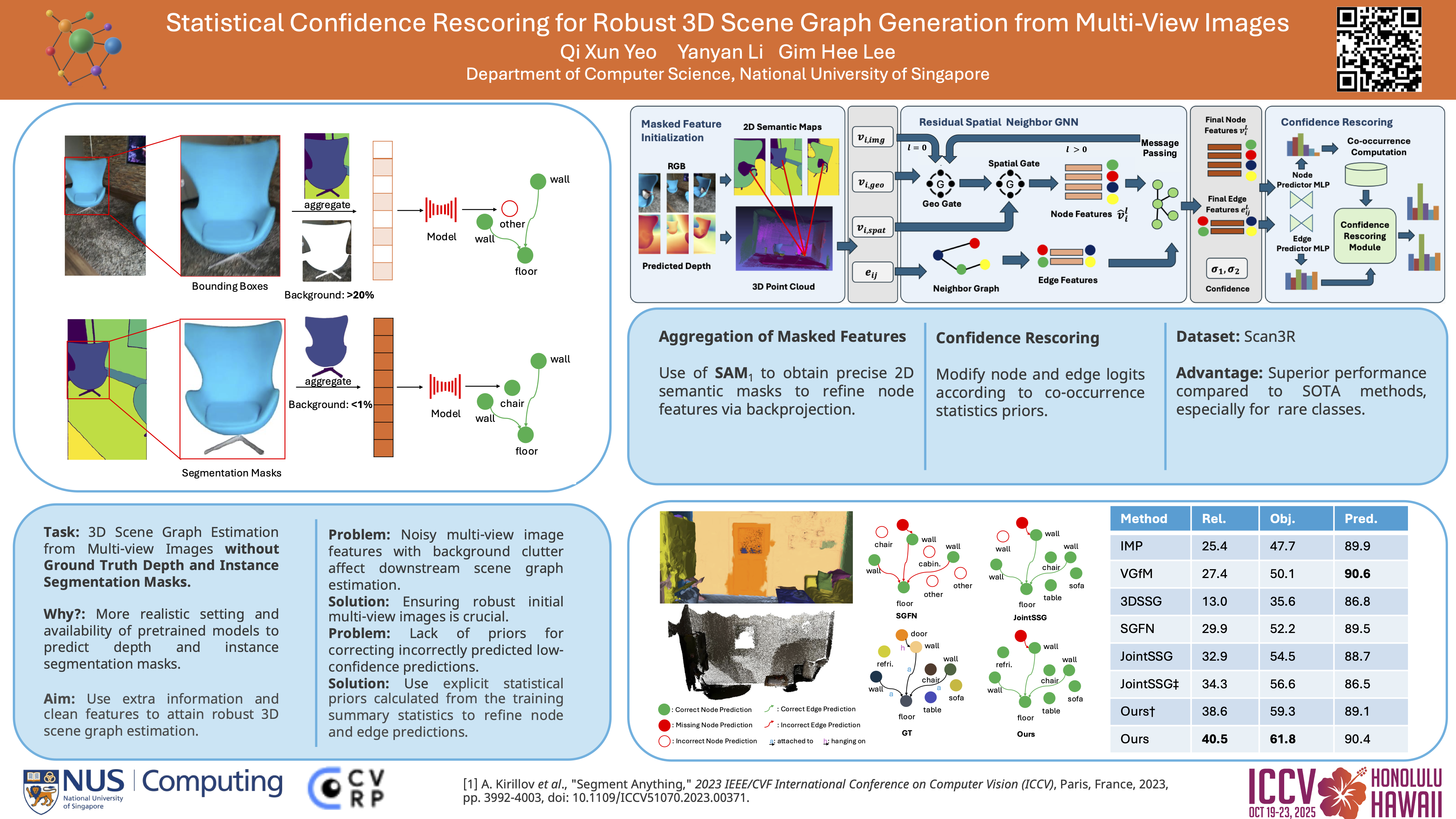
Modern 3D semantic scene graph estimation methods utilise ground truth 3D annotations to accurately predict target objects, predicates, and relationships. In the absence of given 3D ground truth representations, we explore leveraging only multi-view RGB images to tackle this task. To attain robust features for accurate scene graph estimation, we must overcome the noisy reconstructed pseudo point-based geometry from predicted depth maps and reduce the amount of background noise present in multi-view image features. The key is to enrich node and edge features with accurate semantic and spatial information and through neighbouring relations. We obtain semantic masks to guide feature aggregation to filter background features and design a novel method to incorporate neighbouring node information to aid robustness of our scene graph estimates. Furthermore, we leverage on explicit statistical priors calculated from the training summary statistics to refine node and edge predictions based on their one-hop neighbourhood. Our experiments show that our method outperforms current methods purely using multi-view images as the initial input. Our code will be open-sourced upon paper acceptance.