DriveArena: A Closed-loop Generative Simulation Platform for Autonomous Driving
{kind=link}
Abstract
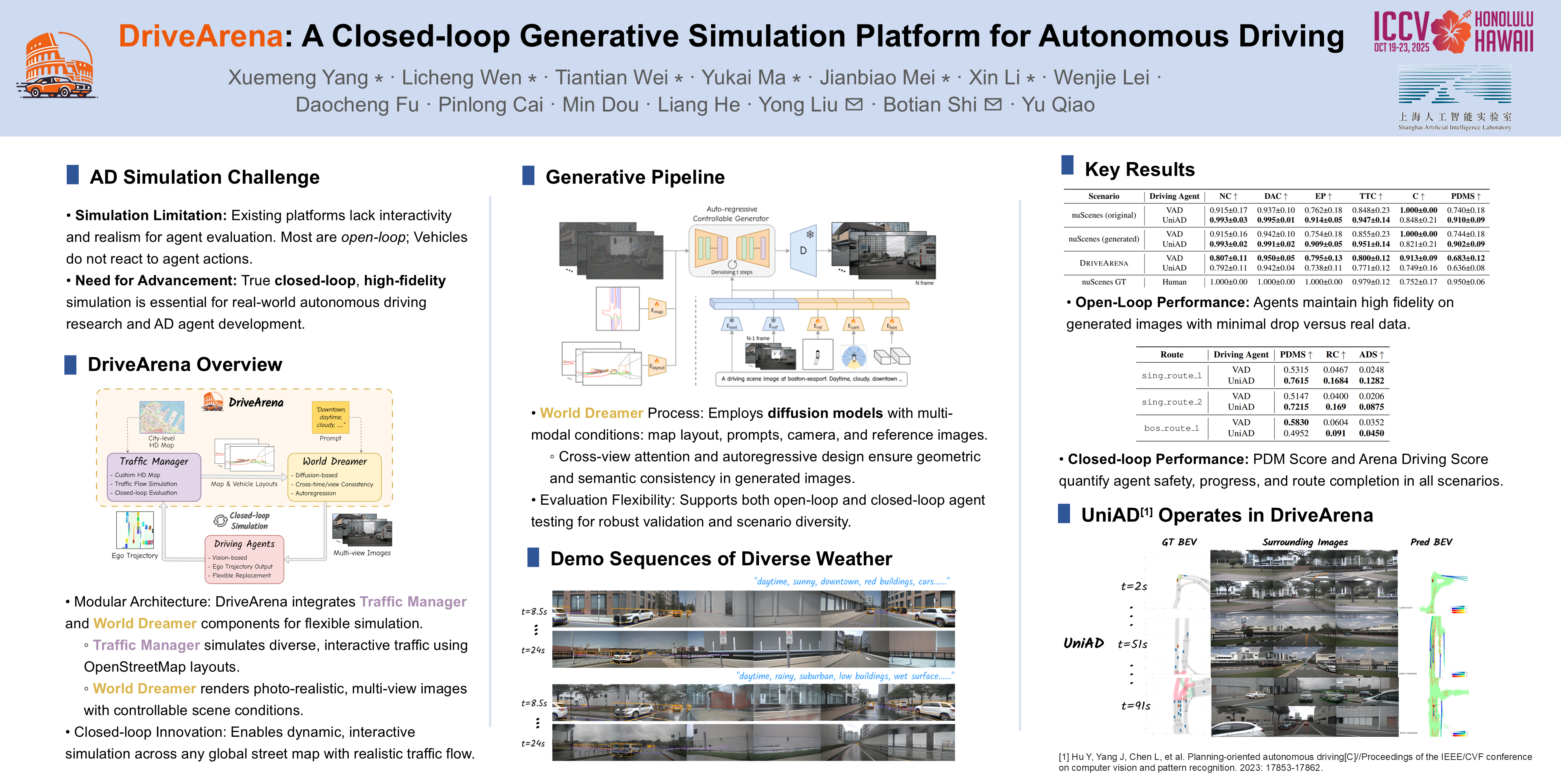
This paper introduces DriveArena, the first high-fidelity closed-loop simulation system designed for driving agents navigating real-world scenarios. DriveArena comprises two core components: Traffic Manager, a traffic simulator capable of generating realistic traffic flow on any global street map, and World Dreamer, a high-fidelity conditional generative model with infinite auto-regression. DriveArena supports closed-loop simulation using road networks from cities worldwide, enabling the generation of diverse traffic scenarios with varying styles. This powerful synergy empowers any driving agent capable of processing real-world images to navigate in DriveArena's simulated environment. Furthermore, DriveArena features a flexible, modular architecture, allowing for multiple implementations of its core components and driving agents. Serving as a highly realistic arena for these players, our work provides a valuable platform for developing and evaluating driving agents across diverse and challenging scenarios. DriveArena takes a significant leap forward in leveraging generative models for driving simulation platforms, opening new avenues for closed-loop evaluation of autonomous driving systems. Codes of DriveArena are attached to the supplementary material. Project Page: https://blindpaper.github.io/DriveArena/