DRaM-LHM: A Quaternion Framework for Iterative Camera Pose Estimation
{kind=link}
Abstract
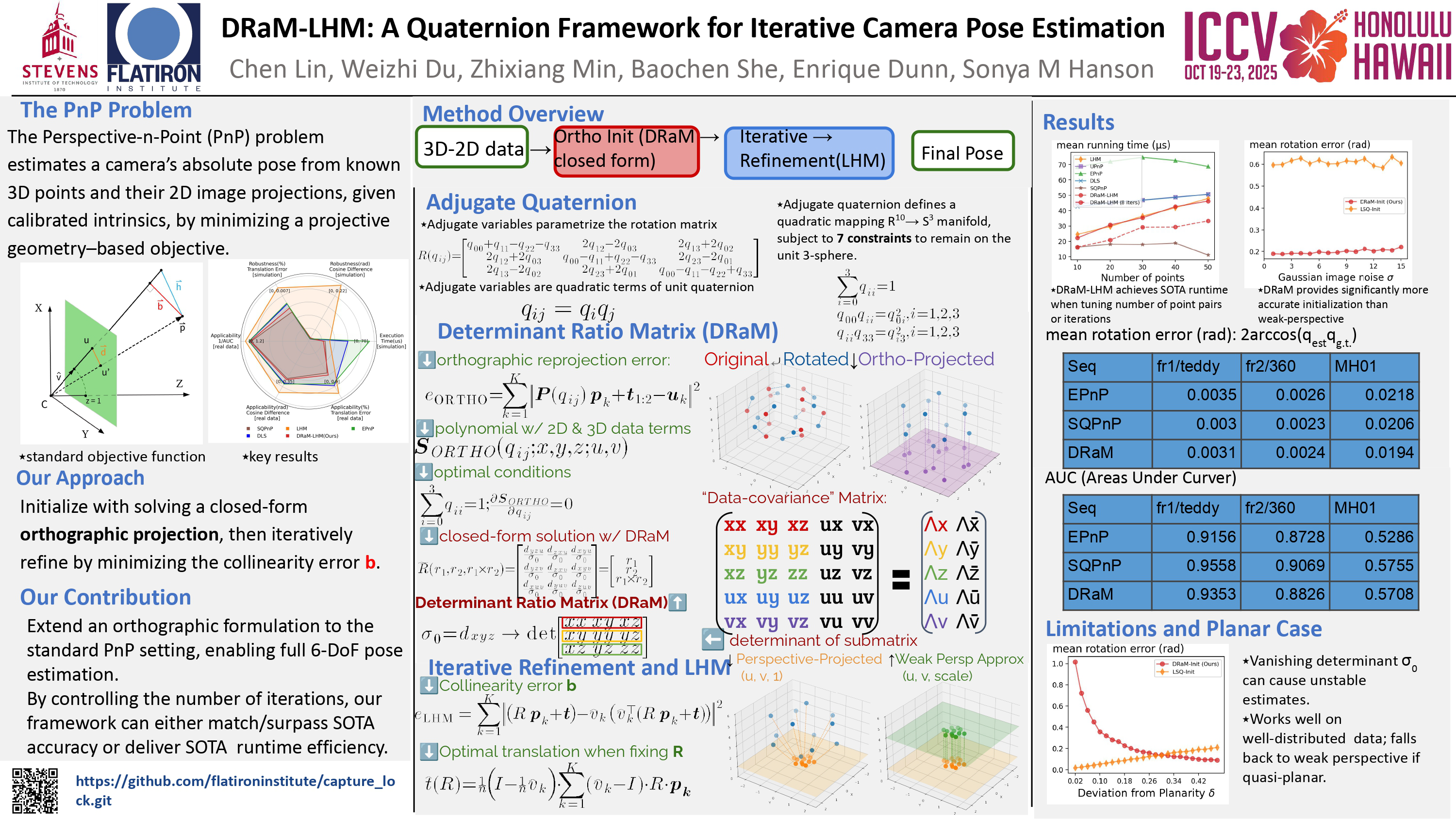
We explore a quaternion adjugate matrix-based representation for rotational motion in the Perspective-n-Point (PnP) problem. Leveraging quadratic quaternion terms within a Determinant Ratio Matrix (DRaM) estimation framework, we extend its application to perspective scenarios, providing a robust and efficient initialization for iterative PnP pose estimation. Notably, by solving the orthographic projection least-squares problem, DRaM provides a reliable initialization that enhances the accuracy and stability of iterative PnP solvers. Experiments on synthetic and real data demonstrate its efficiency, accuracy, and robustness, particularly under high noise conditions. Furthermore, our non-minimal formulation ensures numerical stability, making it effective for real-world applications.