NormalLoc: Visual Localization on Textureless 3D Models using Surface Normals
Jiro Abe ⋅ Gaku Nakano ⋅ Kazumine Ogura
2025 Poster
{kind=link}
Abstract
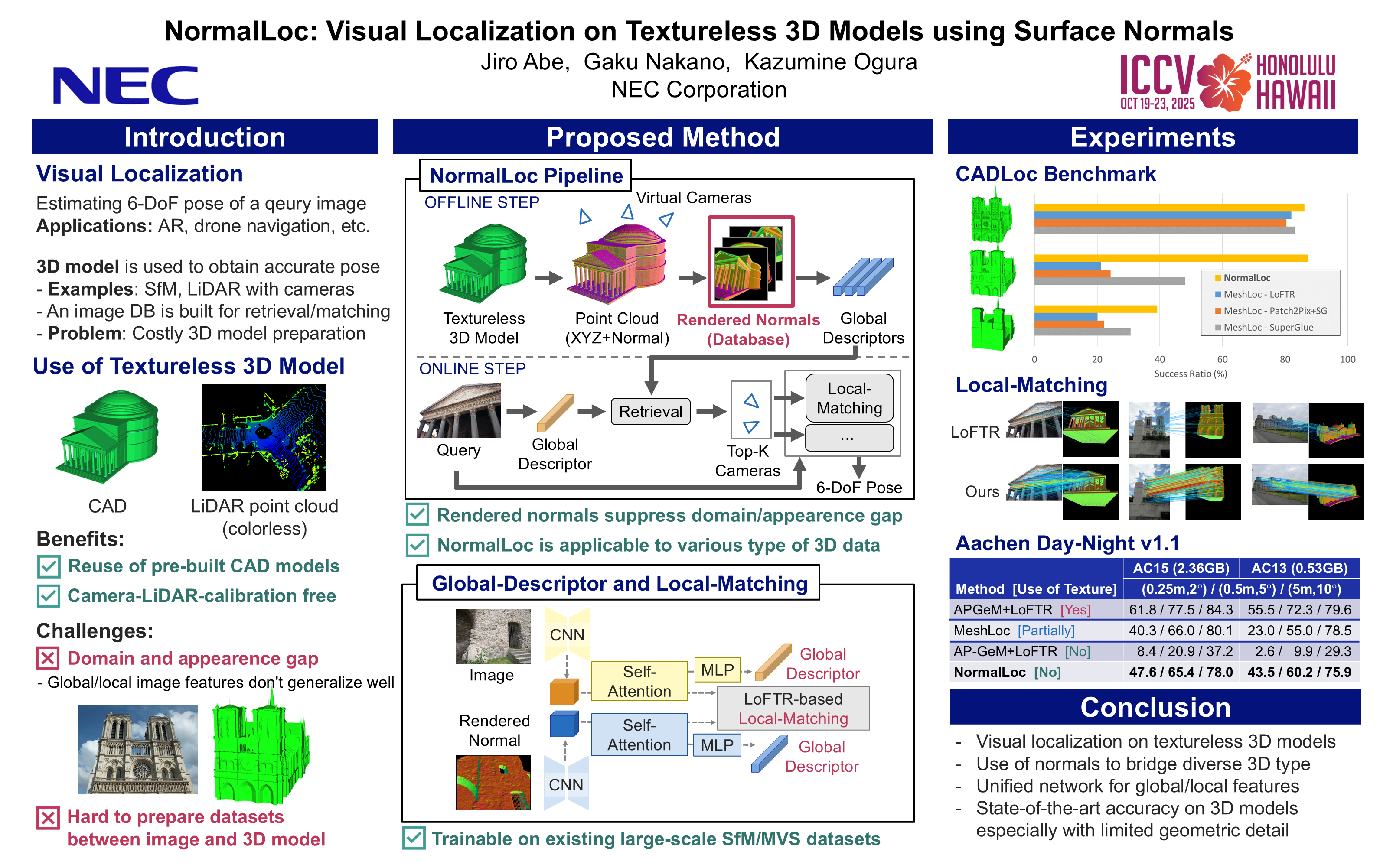
We propose NormalLoc, a novel visual localization method for estimating the 6-DoF pose of a camera using textureless 3D models. Existing methods often rely on color or texture information, limiting their applicability in scenarios where such information is unavailable. NormalLoc addresses this limitation by using rendered normal images generated from surface normals of 3D models to establish a training scheme for both global descriptor computation and matching. This approach enables robust visual localization even when geometric details are limited. Experimental results demonstrate that NormalLoc achieves state-of-the-art performance for visual localization on textureless 3D models, especially in scenarios with limited geometric detail.
Chat is not available.
Successful Page Load