Unsupervised RGB-D Point Cloud Registration for Scenes with Low Overlap and Photometric Inconsistency
{kind=link}
Abstract
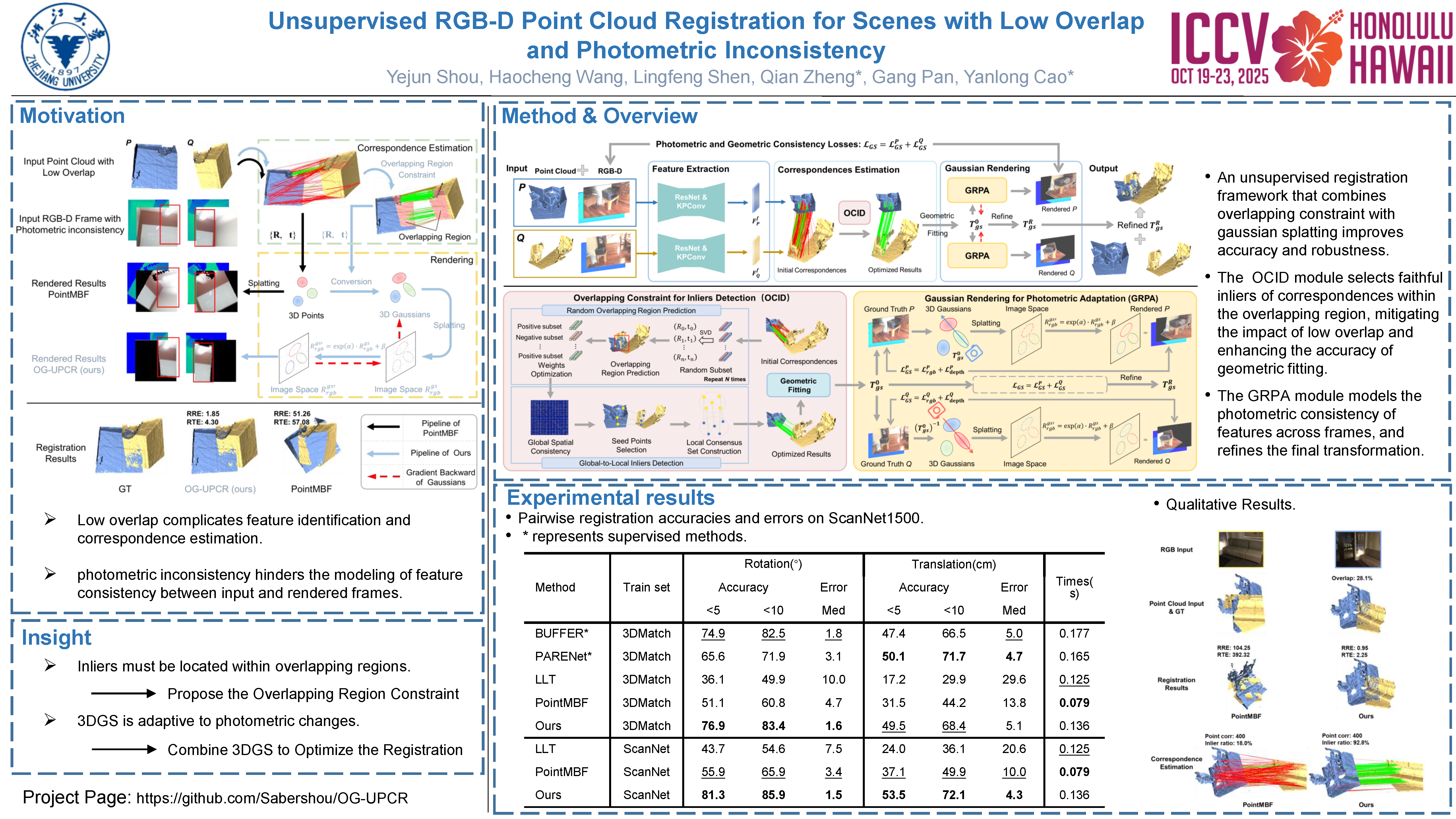
Point cloud registration is a fundamental task in 3D vision, playing a crucial role in various fields. With the rapid advancement of RGB-D sensors, unsupervised point cloud registration methods based on RGB-D sequences have demonstrated excellent performance. However, existing methods struggle in scenes with low overlap and photometric inconsistency. Low overlap results in numerous correspondence outliers, while photometric inconsistency hinders the model's ability to extract discriminative features. To address these challenges, we first propose the Overlapping Constraint for Inliers Detection (OCID) module, which filters and optimizes the initial correspondence set using an overlappping constraint. This module robustly selects reliable correspondences within the overlapping region while maintaining a balance between accuracy and efficiency. Additionally, we introduce a novel scene representation, 3DGS, which integrates both geometric and texture information, making it particularly well-suited for RGB-D registration tasks. Building on this, we propose the Gaussian Rendering for Photometric Adaptation (GRPA) module, which refines the geometric transformation and enhances the model's adaptability to scenes with inconsistent photometric information. Extensive experiments on ScanNet and ScanNet1500 demonstrate that our method achieves state-of-the-art performance.