Breaking Rectangular Shackles: Cross-View Object Segmentation for Fine-Grained Object Geo-Localization
{kind=link}
Abstract
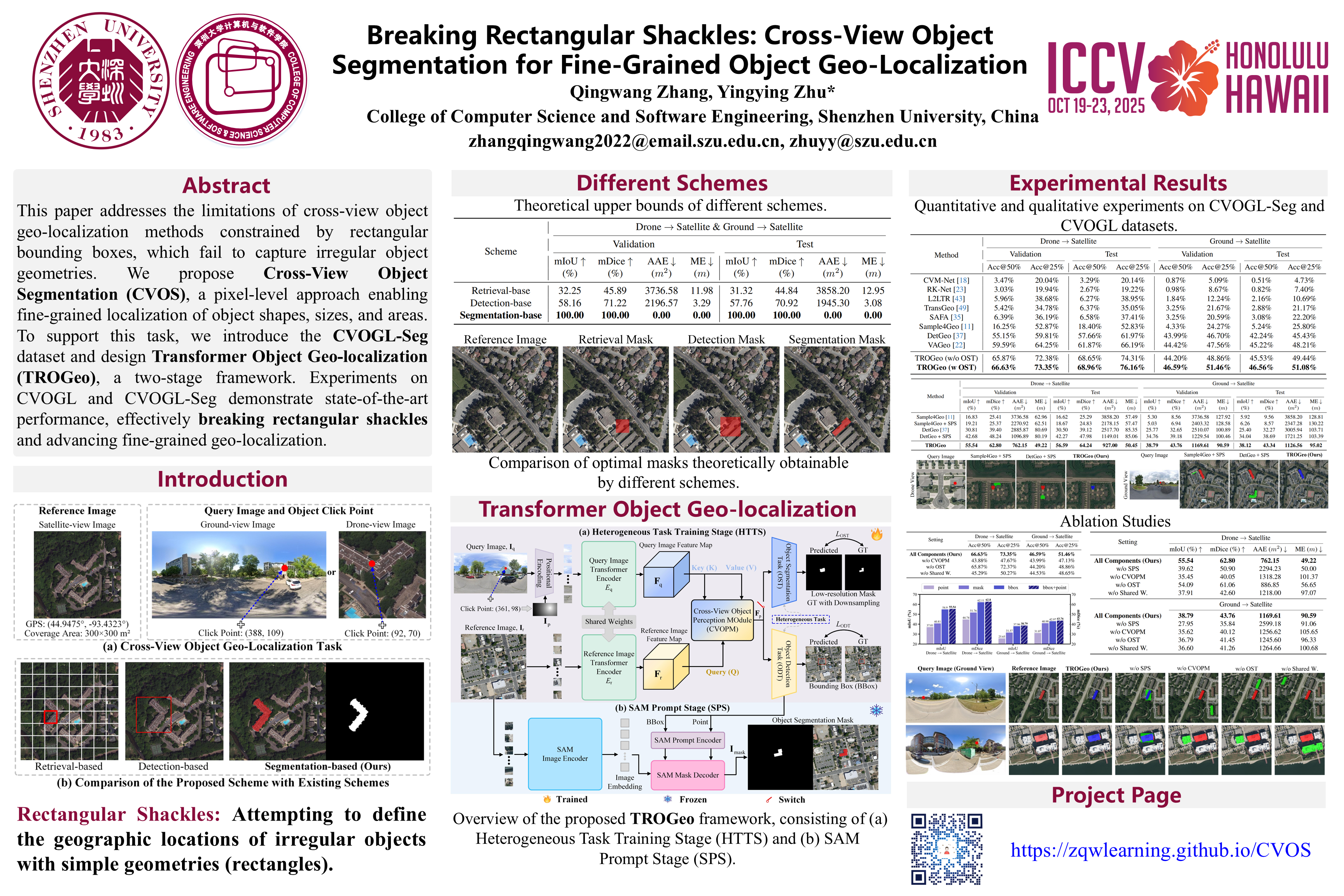
This paper addresses the limitations of existing cross-view object geo-localization schemes, which rely on rectangular proposals to localize irregular objects in satellite imagery. These ``rectangular shackles" inherently struggle to precisely define objects with complex geometries, leading to incomplete coverage or erroneous localization. We propose a novel scheme, cross-view object segmentation (CVOS), which achieves fine-grained geo-localization by predicting pixel-level segmentation masks of query objects. CVOS enables accurate extraction of object shapes, sizes, and areas—critical for applications like urban planning and agricultural monitoring. We also created the CVOGL-Seg dataset specifically to support and evaluate CVOS. To tackle CVOS challenges, we introduce Transformer Object Geo-localization (TROGeo), a two-stage framework. First, the Heterogeneous Task Training Stage (HTTS) employs a single transformer encoder with a Cross-View Object Perception Module (CVOPM) and is trained by learning a heterogeneous task.Second, the SAM Prompt Stage (SPS) utilizes SAM’s zero-shot segmentation capability, guided by HTTS outputs, to generate precise masks. We extensively evaluate our method on CVOGL and CVOGL-Seg datasets and demonstrate state-of-the-art performance compared to existing models. Our work demonstrates that CVOS breaks the rectangular shackles and unlocks new potential for fine-grained object geo-localization.