Towards Visual Localization Interoperability: Cross-Feature for Collaborative Visual Localization and Mapping
{kind=link}
Abstract
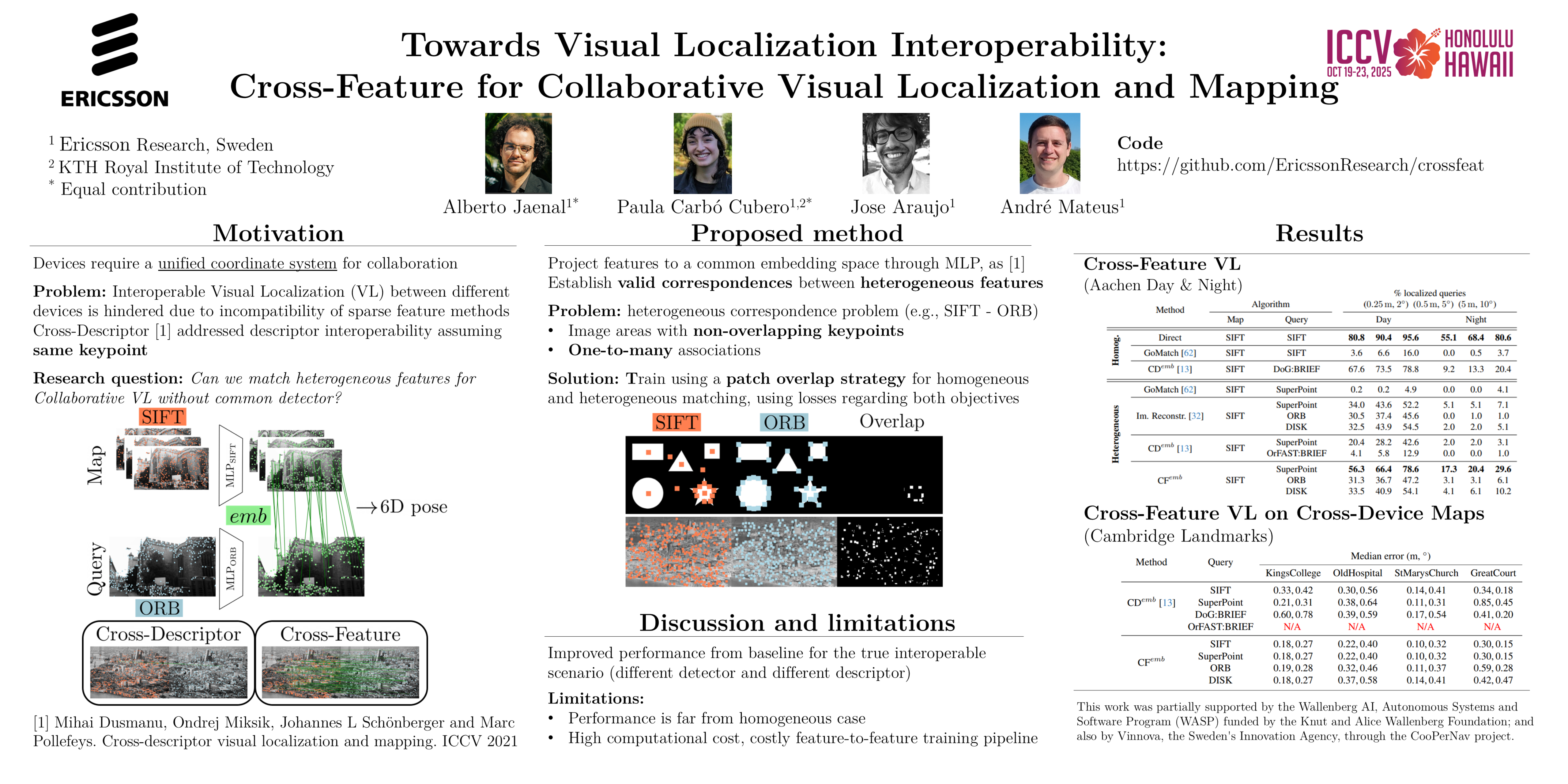
The growing presence of vision-based systems in the physical world comes with a major requirement: highly accurate estimation of the pose, a task typically addressed through methods based on local features. The totality of the available feature-based localization solutions are designed under the assumption of using the same feature for mapping and localization. However, as the implementation provided by each vendor is based on heterogeneous feature extraction algorithms, collaboration between different devices is not straightforward or even not possible. Although there are some alternatives, such as re-extracting the features or reconstructing the image from them, these are impractical or costly to implement in a real pipeline. To overcome this, and inspired in the seminal work Cross-Descriptor [12], we propose Cross-Feature, a method that applies a patch-based training strategy to a simple MLP which projects features to a common embedded space. As a consequence, our proposal allows to establish suitable correspondences between features computed through heterogeneous algorithms, e.g., SIFT [23] and SuperPoint [9]. We experimentally demonstrate the validity of Cross-Feature by evaluating it in tasks as Image Matching, Visual Localization and a new Collaborative Visual Localization and Mapping scenario. We believe this is the first step towards full Visual Localization interoperability. Code and data will be made available.