Enhanced Event-based Dense Stereo via Cross-Sensor Knowledge Distillation
{kind=link}
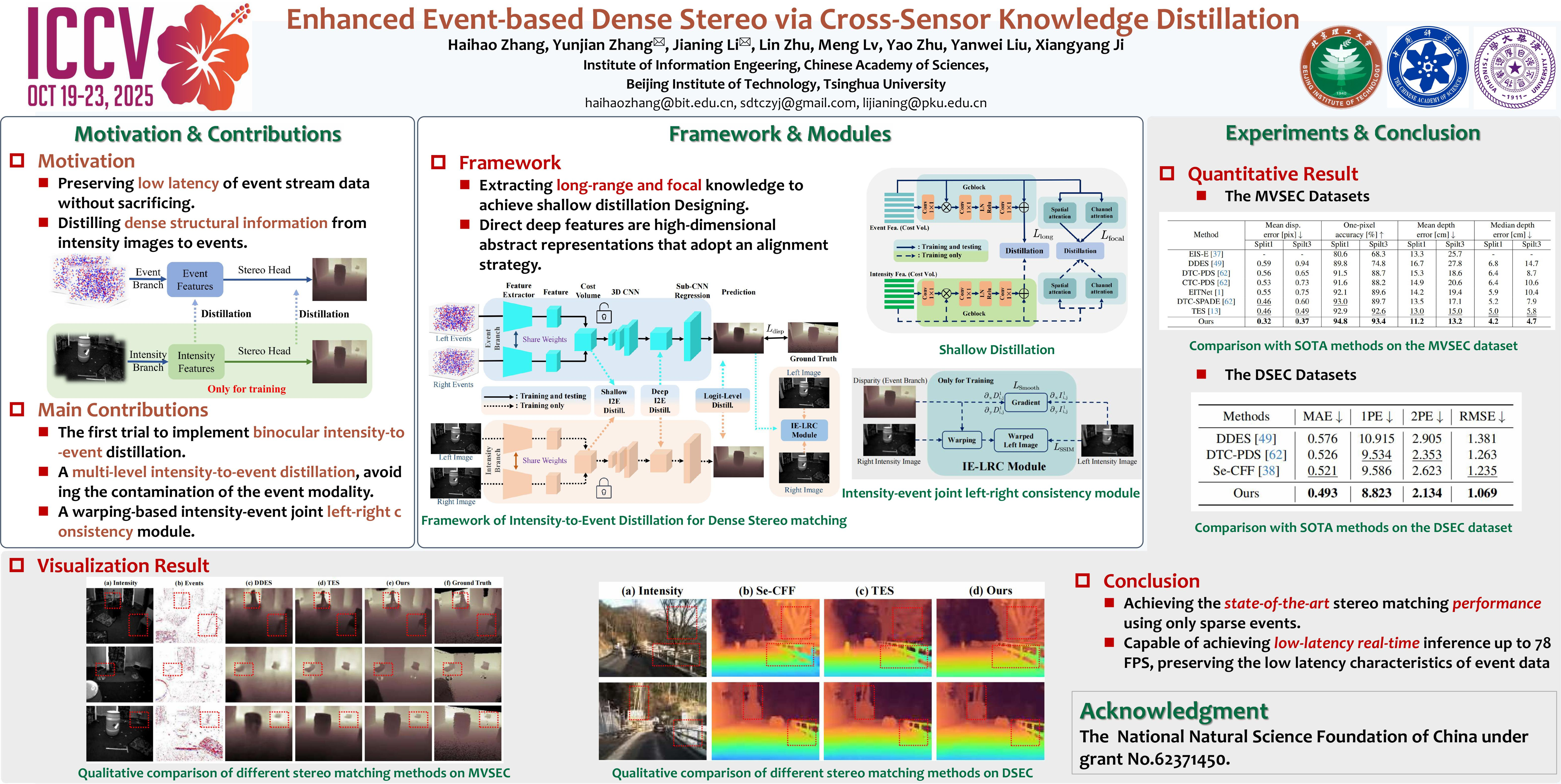
Abstract
Accurate stereo matching under fast motion and extreme lighting conditions is a challenge for many vision applications. Event cameras have the advantages of low latency and high dynamic range, thus providing a reliable solution to this challenge. However, since events are sparse, this makes it an ill-posed problem to obtain dense disparity using only events. In this work, we propose a novel framework for event-based dense stereo via cross-sensor knowledge distillation. Specifically, a multi-level intensity-to-event distillation strategy is designed to maximize the potential of long-range information, local texture details, and task-related knowledge of the intensity images. Simultaneously, to enforce the cross-view consistency, an intensity-event joint left-right consistency module is proposed. With our framework, extensive dense and structural information contained in intensity images is distilled to the event branch, so retaining only the events can predict dense disparities during inference, preserving the low latency characteristics of the events. Adequate experiments conducted on the MVSEC and DSEC datasets demonstrate that our method exhibits superior stereo matching performance than baselines, both quantitatively and qualitatively.