EMatch: A Unified Framework for Event-based Optical Flow and Stereo Matching
{kind=link}
Abstract
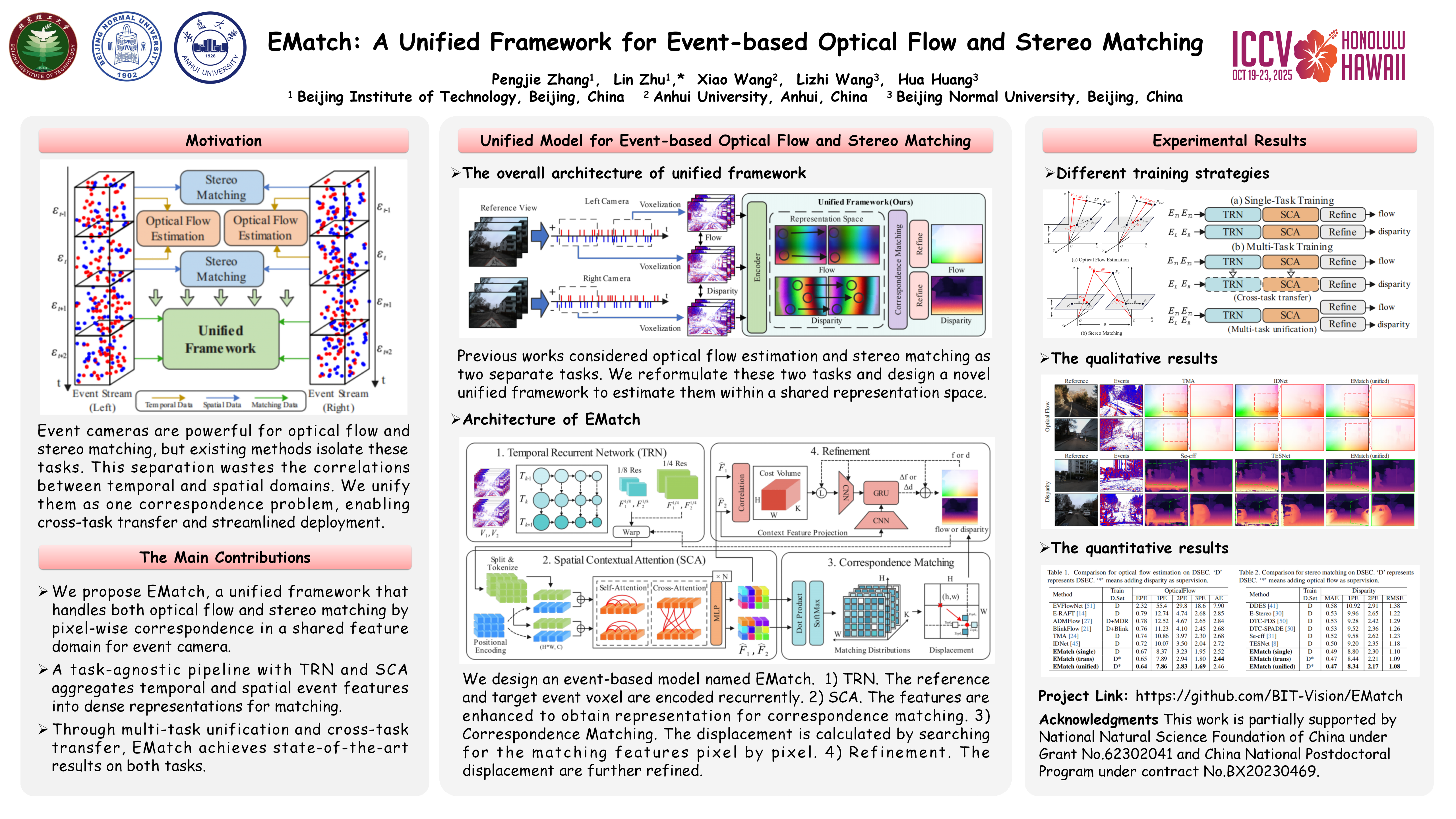
Event cameras have shown promise in vision applications like optical flow estimation and stereo matching with many specialized architectures. However, existing works only focus event data within the confines of task-specific domains, overlooking the correlations between tasks across the temporal and spatial domains. In this paper, we propose a novel matching-based framework for event cameras to estimate flow and disparity simultaneously in a shared representation space, reformulating them as a unified pixel-wise correspondence matching problem. Specifically, our method utilizes a Temporal Recurrent Network to aggregate asynchronous event features across temporal or spatial domains, and a Spatial Contextual Attention to enhance knowledge transfer across event flows via temporal or spatial interactions. By utilizing a shared pixel-wise feature similarities module, our network performs optical flow estimation from temporal event segments and stereo matching from spatial event segments simultaneously. Our unified model inherently supports multi-task unification and cross-task transfer, which facilitate training and streamline deployment. Without the need for retraining on specific tasks, our model can effectively handle both event-based flow and stereo estimation, achieving state-of-the-art performance on both tasks. Our code will be released upon acceptance.