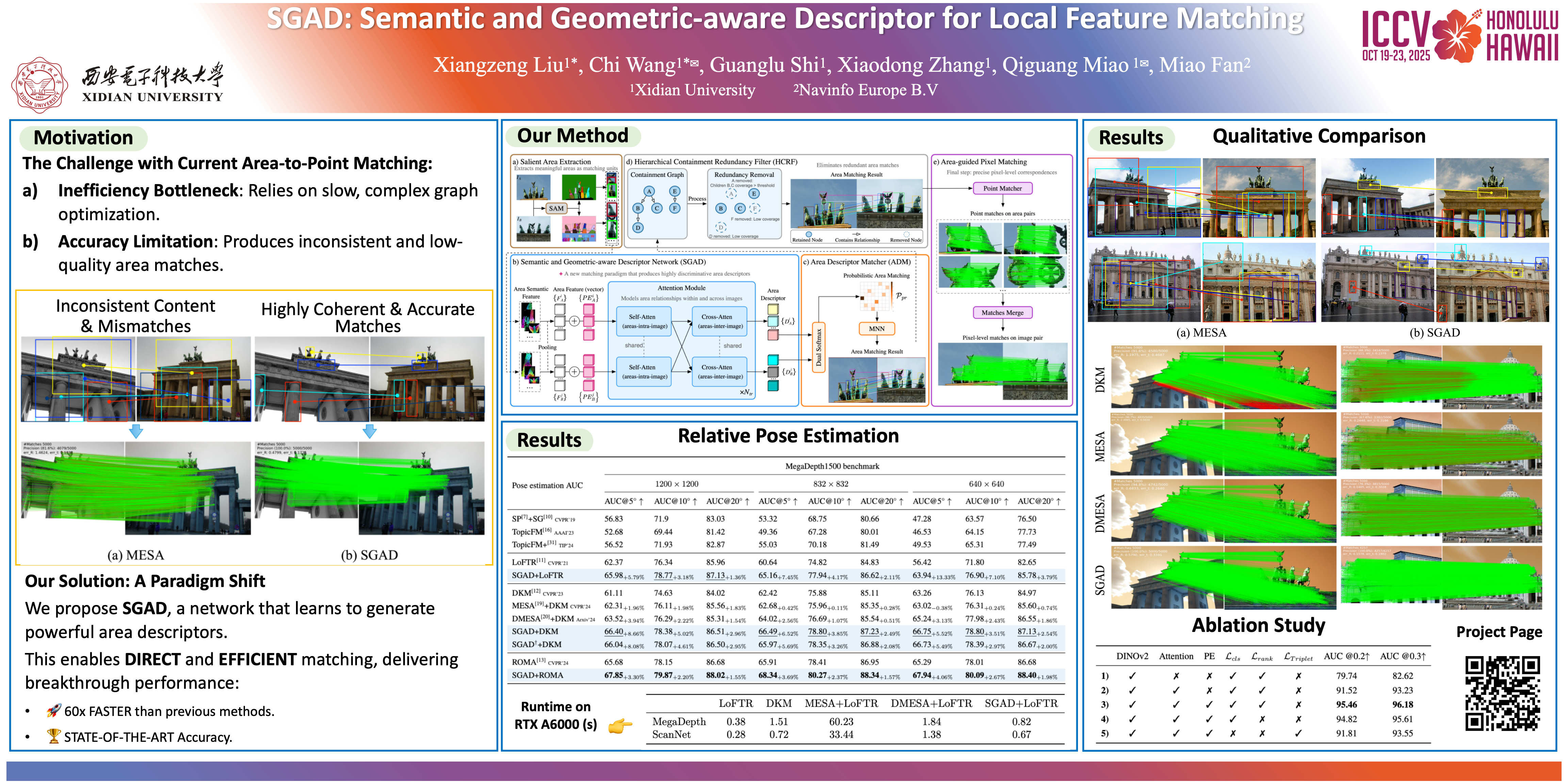
SGAD: Semantic and Geometric-aware Descriptor for Local Feature Matching
Xiangzeng Liu ⋅ CHI WANG ⋅ Guanglu Shi ⋅ Xiaodong Zhang ⋅ Qiguang Miao ⋅ Miao Fan
 Highlight
Highlight
2025 Poster
{kind=link}
Abstract
Local feature matching remains a fundamental challenge in computer vision. Recent Area to Point Matching (A2PM) methods have improved matching accuracy. However, existing research based on this framework relies on inefficient pixel-level comparisons and complex graph matching that limit scalability. In this work, we introduce the Semantic and Geometric-aware Descriptor Network (SGAD), which fundamentally rethinks area-based matching by generating highly discriminative area descriptors that enable direct matching without complex graph optimization. This approach significantly improves both accuracy and efficiency of area matching. We further improve the performance of area matching through a novel supervision strategy that decomposes the area matching task into classification and ranking subtasks. Finally, we introduce the Hierarchical Containment Redundancy Filter (HCRF) to eliminate overlapping areas by analyzing containment graphs. SGAD demonstrates remarkable performance gains, reducing runtime by 60$\times$ (0.82s vs. 60.23s) compared to MESA. Extensive evaluations show consistent improvements across multiple point matchers: SGAD+LoFTR reduces runtime compared to DKM, while achieving higher accuracy (0.82s vs. 1.51s, 65.98 vs. 61.11) in outdoor pose estimation, and SGAD+ROMA delivers +7.39\% AUC@5$^\circ$ in indoor pose estimation, establishing a new state-of-the-art.
Chat is not available.
Successful Page Load